
CONTROL SYSTEMS ENGINEERING
7th Edition
ISBN: 9781119185666
Author: NISE
Publisher: WILEY
expand_more
expand_more
format_list_bulleted
Concept explainers
Videos
Textbook Question
Chapter 1, Problem 3P
An aircraft's attitude varies in roll, pitch, and yaw as defined in Figure Pl .2. Draw a functional block diagram for a closed-loop system that stabilizes the roll as follows: The system measures the actual roll angle with agyro and compares the actual roll angle w ith the desired roll angle. The ailerons respond to the roll-angle error by undergoing an angular deflection. The aircraft responds to this angular deflection, producing a roll angle rate. Identify the input and output transducers, the controller, and the plant. Further, identify the nature of each signal. [Section 1.4: Introduction to a Case Study]
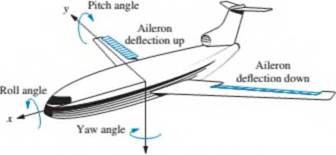
FIGURE Pl.2 Aircraft attitude defined
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
5.Design a system to measure the bending moment (up and down) and torque in the tail boom of the human-powered aircraft shown below. You will need two Wheatstone bridges. Your system should measure the bending and torque independently, but not be sensitive to any other internal forces, like axial force, transverse shear, or bending moment about the vertical axis (back and forth).
(If relevant) A clearly labeled diagram (or diagrams) about your analysis with a coordinate system and relevant labels.
Final answer with appropriate units and significant figures. You can use the fprintf() command in MATLAB to format numerical results
A 2-3 sentence reflection on your answer. Does it make sense? Why or why not? What are some implications?
(a) Make a few clear, labeled sketches showing approximately where you would place the strain gauges. Consider the location (along the length of the boom), positioning (around the circumference of the boom), and orientation of the gauges. Show clearly…
Problem 3:
Crankshaft mechanism is one of the most important mechanical system used to convert translational motion or
reciprocating motion to rotational motion and vice versa. It is widely used in cars' engines and hydraulic pumps.
Your role in car's engine manufacturing company is to analyze the displacement, velocity and acceleration
diagrams for crankshaft planer mechanism to later find the forces of the links to avoid overloading the system.
Your manger asked you the provide detailed analysis of the crankshaft planar mechanism shown in Figure.3.
Part.1:
-140 mm
60 mm
Crank
Connecting Rod
x(t)
V(t)
a(t)
F(t)
(OB
Piston
x(t)
Reference
Figure.3: Crankshaft planar mechanism for a car 'engine.
If the zero-position x=0 at the extreme right as shown in Figure.3, perform the following tasks:
1. Derive a mathematical relation for displacement, velocity and acceleration x(t), v(t) and a(t) of the
piston B.
2. Derive a mathematical relation for force F(t) on the piston B by making use of the…
2. A model for an airplane's pitch loop is shown below. Find the range of K that will keep the system
stable. Can the system ever be unstable for positive values of K?
Controller
Aircraft dynamics
Commanded
pitch angle +
K(s + 1)
Pitch angle
s + 10
s2 + 0.6s + 9
(s + 4.85)
1
Gyro
Chapter 1 Solutions
CONTROL SYSTEMS ENGINEERING
Ch. 1 - Prob. 1RQCh. 1 - Prob. 2RQCh. 1 - Prob. 3RQCh. 1 - Prob. 4RQCh. 1 - State one condition under which the error signal...Ch. 1 - Prob. 6RQCh. 1 - Name two advantages of having a computer in the...Ch. 1 - Name the three major design criteria for control...Ch. 1 - Prob. 9RQCh. 1 - Physically, what happens to a system that is...
Ch. 1 - Instability is attributable to what pan of the...Ch. 1 - Describe a typical control system analy sis task.Ch. 1 - Describe a typical control system design task.Ch. 1 - Prob. 14RQCh. 1 - Name three approaches to the mathematical modeling...Ch. 1 - Briefly describe each of your answers to Question...Ch. 1 - Prob. 1PCh. 1 - Prob. 2PCh. 1 - An aircraft's attitude varies in roll, pitch, and...Ch. 1 - We can build a control system that will...Ch. 1 - Prob. 5PCh. 1 - During a medical operation an anesthesiologist...Ch. 1 - Prob. 7PCh. 1 - Prob. 8PCh. 1 - The human eye has a biological control system that...Ch. 1 - A Segway ®5 Personal Transporter (PT) (Figure Pl...Ch. 1 - In humans, hormone levels, alertness, and core...Ch. 1 - Tactile feedback is an important component in the...Ch. 1 - Prob. 13PCh. 1 - Moored floating platforms are subject to external...Ch. 1 - In the Case Study of Section 1.4. an antenna...Ch. 1 - Figure Pl.5 shows the topology of a photo-voltaic...Ch. 1 - Prob. 17PCh. 1 - Prob. 18PCh. 1 - Prob. 19PCh. 1 - Prob. 20PCh. 1 - Prob. 21PCh. 1 - Contol of HIV/AIDS. As of 2012. the number of...Ch. 1 - Prob. 23PCh. 1 - Parabolic trough collector. A set of parabolic...
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Task 1): The quarter-car model of a vehicle suspension and its free body diagram are shown in Figure 1. In this simplified model, the masses of the wheel, tire, and axle are neglected, and the mass m represents one-fourth of the vehicle mass. The spring constant k models the elasticity of both the tire and the suspension spring. The damping constant c models the shock absorber. The equilibrium position of m when y=0 is x=0. The road surface displacement y(t) can be derived from the road surface profile and the car's speed. a) Draw free body diagram (FBD) and derive the equation of motion of m with y(t) as the input, and obtain the transfer function. Body m 1 Suspension Road k Datum level Figure 1 Dynamic Analysis and Control If assume: m=250 kg k=10000, 30000, 50000 N/m c=1000, 2000, 3000 N.s/m b) Plot magnification ratio vs frequency ratio (r=0-4) diagrams for the parameters given above (you can draw the three curves in one diagram for three different k values and do the same for the…arrow_forwardHello, I need the correct response and the formula to slave this problem please. I want to found the technic to get the value of h.Thank youarrow_forwardLearning Goal: To understand how to use the relative position and velocity equations to find the linear and angular velocity of members in an assembly. A piston is driven by a crankshaft as shown. The crank arm (member AB) has a length of ri = 0.50 in and the connecting rod (member BC') has a length of r2 = 3.65 in . The crankshaft rotates in the counterclockwise or positive direction.(Figure 1) y r2 Find the magnitude of the velocity of C, vc, when the piston has moved to the new position 0 = 27.0° and ø = 7.01° The crankshaft (member AB) is still rotating at 220 rpm . Express your answer to three significant figures and include the appropriate units. • View Available Hint(s) Value Units Submitarrow_forward
- Frame the three equations and find the constants of the Freudenstein's equation for the given data. A four-bar mechanism is to be designed in a automotive industry to perform automation of packaging. The given input angles and the required output angles are given below. O, is along 03 is 40° greater than 02 Input angle, 0 02 is 30° greater than 01 positive x axis Pi is 20° lesser than P2 Output angle, O P 2 is same as 03 P3 = 02arrow_forward2. Determine the transfer function from aileron deflection to roll rate in a F-104A aircraft. Assume the airplane is flying at sea level at a speed of 87m/sec. The F104A has the following aerodynamic and geometric data: Mass moment of inertia about the roll axis: I, = 4676kg m? Roll damping: 6079N m/rad/sec Roll moment from aileron control input: 380N m/degarrow_forwardLearning Goal: To understand how to use the relative position and velocity equations to find the linear and angular velocity of members in an assembly. A piston is driven by a crankshaft as shown. The crank arm (member AB) has a length of r₁=0.55 in and the connecting rod (member BC) has a length of r2 = 4.25 in. The crankshaft rotates in the counterclockwise or positive direction. (Figure 1) Figure C 1₂ @₂ @1 0 B X 1 of 2 Part C - Velocity of C Find the magnitude of the velocity of C, vc, when the piston has moved to the new position = 33.0° and p = 6.23°. The crankshaft (member AB) is still rotating at 300 rpm Express your answer to three significant figures and include the appropriate units. ► View Available Hint(s) vc= 15.5 in S Submit Completed Part D - Rotational Speed of the Crankshaft W1 = Previous Answers The velocity of the piston is vc = 70.0 in/s j the instant when 0 = 33.0° and = 6.23°. Find the rotational speed of the crankshaft (member AB) at this instant. The crankshaft…arrow_forward
- What are the Lagrange equations of the PR manipulator?arrow_forwardQ4) In Fig.2, The location of the tool, 77 is not accurately known. Using force control, the robot feels around with the tool tip until it inserts it into the socket (or Goal) at loca- tiongr. Once in this "calibration" configuration (in which (G) and (T) are coincident), the position of the robot, is figured out by reading the joint angle sensors and com- puting the kinematics. Assuming T and T are known, give the transform equation to compute the un- known tool frame,T. 2 Fig.2arrow_forwardConsider two robot-manipulators:• A SCARA robot with joints displacement range q1,2 = −90◦...90◦ and q3 = 0..10cm and links lengths L1,2=10 cm.• A Cartesian robot with joint displacements’ range q1,2,3 = 0..10 cm.Which statement is correct?1) The Cartesian robot has a larger workspace.2) It is not possible to judge the workspace based on the information provided.3) Both robots have revolute joints.4) The SCARA robot has a larger workspace.arrow_forward
- 4) If the forward function for a control system is given below, and the feed backward is unity. Find the range of (K) that make this system stable: G(s) = 7K S5+254 +353 +5S2 + 2S +8 425arrow_forwardHelp me with this ASAP. Thank you! Find the Following: 1. Natural angular velocity 2.Damped angular velocity 3. Equation of motion x(t). Assume Initial conditions for displacement and velocity 4. Graph 2 cycles of the vibrating system. You can use third party app for this.arrow_forwardDetermine a body or system of your own to analyze statically using concept from this class! Requirements: • Draw a static system (either in 2D or 3D). For instance, I may draw a clothes drying rack in 3D. See below for a visual of the clothes drying rack. ● In this drawing prescribe a force or moment at some point on the body. For instance, I may prescribe a force at the top of the drying rack simulating a shirt hanging from the rack. Explain the concepts you would use to figure out an applicable force/moment at another point/member while the body is in equilibrium. For instance, I would use a combination of concepts of FBD/equilibrium and method of joints/sections to find the internal member forces of each drying rack member. 5arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY
Dynamics - Lesson 1: Introduction and Constant Acceleration Equations; Author: Jeff Hanson;https://www.youtube.com/watch?v=7aMiZ3b0Ieg;License: Standard YouTube License, CC-BY